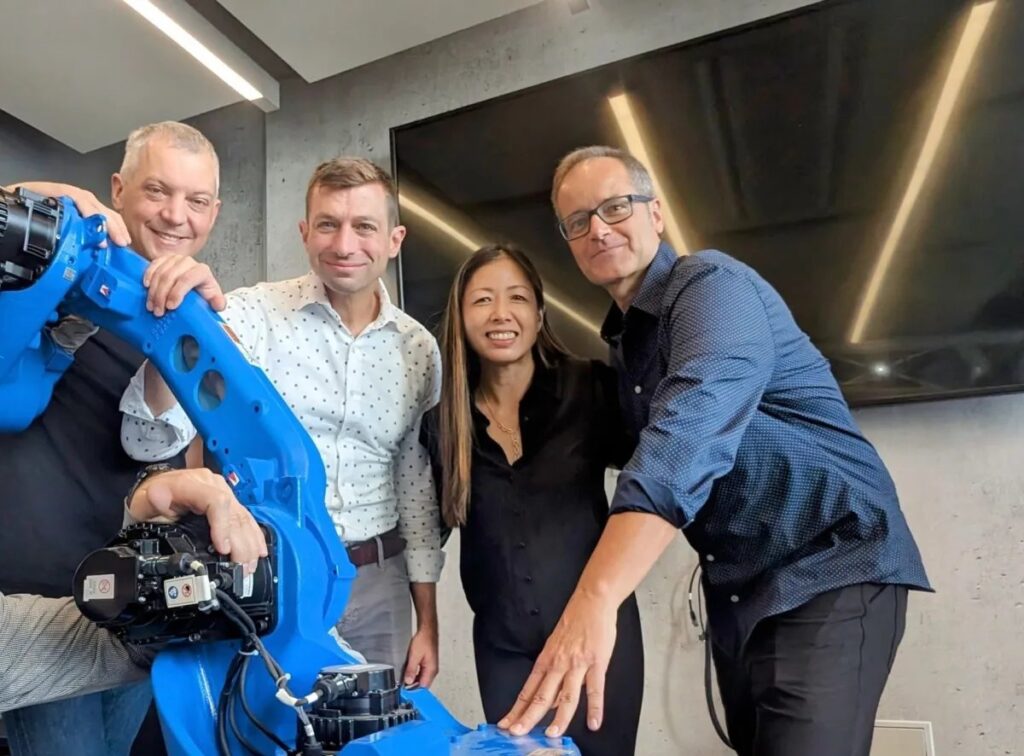
15 de outubro de 2025 — Pesquisadores da Escola John A. Paulson de Engenharia e Ciências Aplicadas (SEAS) da Universidade Harvard desenvolveram um robô capaz de executar tarefas simples sem recorrer a controles eletrônicos complexos. O protótipo, constituído por quatro peças móveis unidas por elásticos e impulsionado por um único motor, tem sua sequência de movimentos determinada apenas pela disposição desses elásticos.
O estudo, liderado pelo doutorando Leon Kamp no laboratório da professora Katia Bertoldi, foi publicado na revista Proceedings of the National Academy of Sciences. A equipe mostrou que, ao ajustar a tensão dos elásticos, o robô consegue mudar de direção ao encontrar obstáculos, percorrer labirintos e até classificar objetos conforme a massa.
O mecanismo básico é formado por uma cadeia de blocos plásticos planos conectados por alavancas. O alongamento de cada elástico estabelece um “custo de energia” para a rotação das alavancas; o robô se move seguindo a sequência com menor gasto energético. Duas antenas frontais detectam contato físico com o ambiente e, quando encontram um obstáculo, forçam a mudança de trajetória sem que seja necessário qualquer processador.
Em outra configuração, o mesmo princípio foi aplicado à separação de itens: objetos são erguidos e depositados em locais diferentes dependendo do peso, novamente sem sensores eletrônicos. Segundo os autores, a abordagem pode levar a robôs menores, mais leves e menos dispendiosos, pois parte da “inteligência” sai do software e passa para a estrutura mecânica.

Imagem: Internet
Com informações de Nanowerk