Pesquisadores da Universidade da Califórnia em San Diego desenvolveram uma pele robótica macia que permite a microrrobôs do tipo “videira”, com apenas alguns milímetros de diâmetro, contornar trajetos sinuosos e estruturas frágeis. O avanço foi detalhado em 15 de outubro na revista Science Advances.
A equipe integrou uma camada muito fina de atuadores de elastômero de cristal líquido (LCE) em pontos estratégicos da pele flexível. Controlando a pressão interna do robô e a temperatura desses atuadores, é possível direcionar o movimento com precisão.
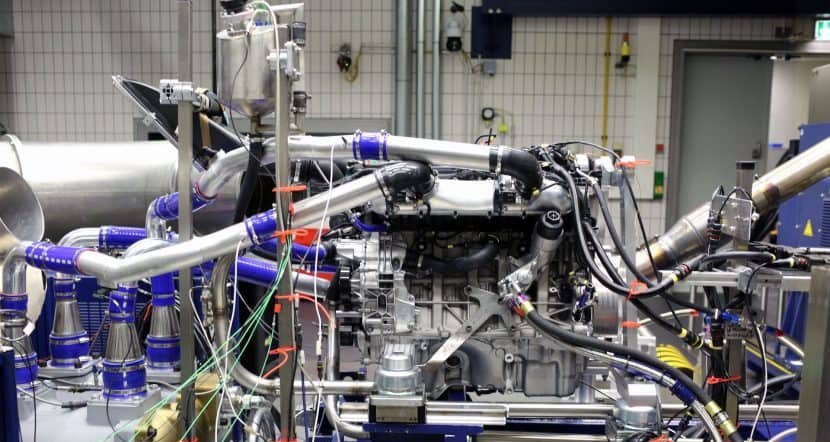
Nos testes, um robô de 3 a 7 mm de diâmetro e 25 cm de comprimento percorreu com sucesso modelos de artérias humanas e o interior de um motor a jato. Quando ativado, o dispositivo executou curvas superiores a 100 graus ao longo do corpo e atravessou espaços apertados equivalentes à metade de sua própria largura.



Miniaturização de sistemas já existentes
Robôs videira já são utilizados em escalas de centímetros a metros, geralmente acionados por motores, tendões ou sistemas pneumáticos. Segundo a autora correspondente Tania K. Morimoto, professora do Departamento de Engenharia Mecânica e Aeroespacial da UC San Diego, esses métodos não funcionam bem em tamanhos reduzidos. O LCE, porém, combina espessura mínima e alta força, tornando-o adequado para robôs milimétricos.



Para aquecer os atuadores, os pesquisadores acoplaram microaquecedores flexíveis sob a pele e desenvolveram um sistema de ajuste fino da pressão interna. A combinação dos dois controles mostrou o melhor desempenho.

Imagem: Internet
Aplicações futuras
Além de potencial uso médico em inspeção intravascular, o protótipo recebeu uma câmera para observar componentes de um motor a jato em passagens estreitas. O pós-doutorando Sukjun Kim afirmou que a mesma pele pode ser adaptada a dispositivos hápticos vestíveis, garras macias e outras plataformas de locomoção flexível.
Os próximos passos incluem tornar o robô teleoperado ou autônomo e reduzir ainda mais suas dimensões.
Com informações de Nanowerk