Pesquisadores apresentaram um sistema não invasivo que orienta baratas-silbadoras de Madagascar por meio de breves emissões de luz ultravioleta combinadas a sensores de movimento, permitindo navegação autônoma em terrenos irregulares. O trabalho foi descrito em 27 de outubro de 2025 na revista Advanced Intelligent Systems.
Dispositivo leve e sem lesões ao inseto
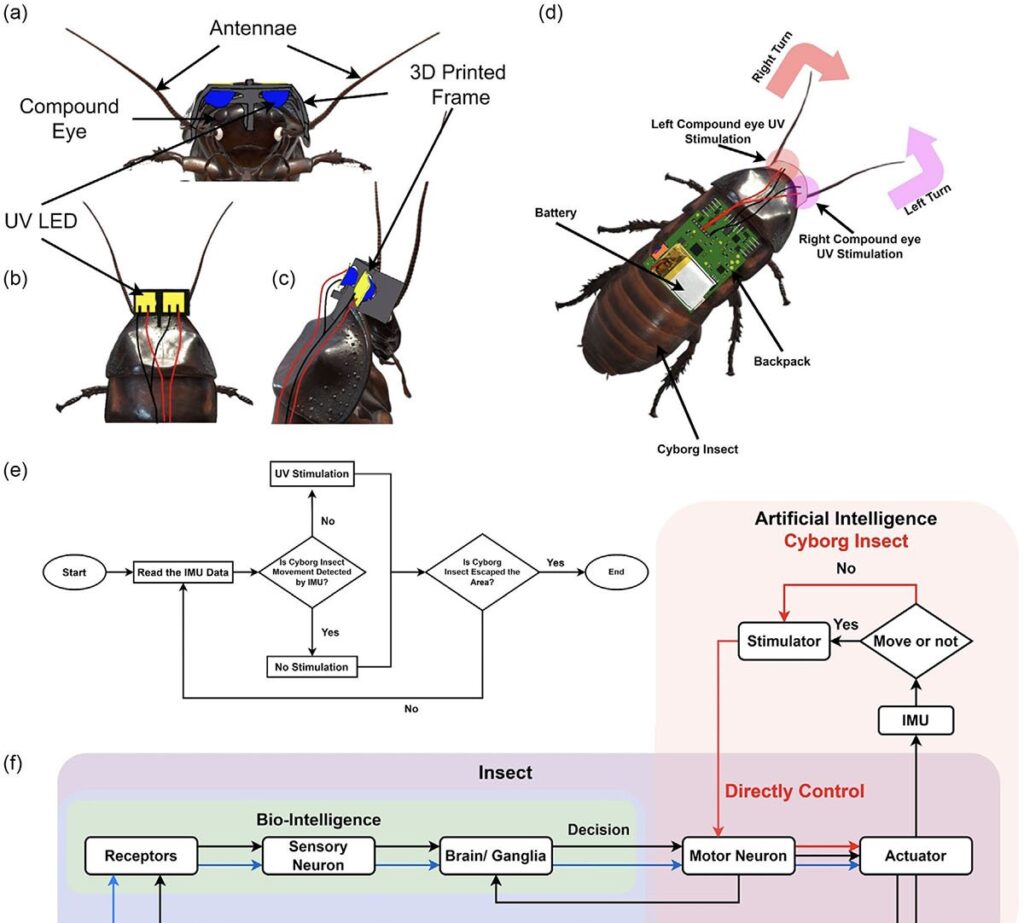
O conjunto eletrônico é composto por um “capacete” com dois LEDs UV posicionados a 2–3 mm dos olhos compostos do inseto e uma “mochila” de 30 mm × 20 mm, pesando 5 g. A mochila abriga bateria de polímero de lítio de 40 mAh, microcontrolador Bluetooth Low Energy, unidade inercial, três sensores de distância time-of-flight (2–120 cm) e sensor de temperatura e umidade. O consumo médio é de aproximadamente 0,25 W, suficiente para cerca de 20 min de operação.
Como a orientação funciona
As baratas exibem fototaxia negativa ao ultravioleta: quando apenas um olho recebe luz de 395 nm por três segundos, o inseto vira para o lado oposto. O controlador envia pulsos quadrados de 1–100 Hz aos LEDs; quanto maior a frequência, maior o ângulo da curva. Testes capturados a 100 quadros por segundo mostraram desvios de cerca de 10° (20 Hz) até 25°–50° (100 Hz), mantendo reprodutibilidade entre indivíduos.


Comparação com estimulação elétrica
Três baratas receberam 150 flashes ópticos cada; outras três foram submetidas a choques elétricos de 3,3 V, 50 Hz, por um segundo, nos fios conectados à antena e tórax. As respostas aos flashes permaneceram constantes, enquanto dois terços dos insetos submetidos à corrente deixaram de reagir após cerca de 60 tentativas, indicando menor fadiga e ausência de danos com o método óptico.



Navegação autônoma em arena de testes
Num ambiente com areia, pedras, muro de 10 cm, abrigos escuros e alimento, 24 % dos insetos sem assistência encontraram a saída em até três minutos, 64 % ficaram presos e 12 % não se moveram. Com algoritmo de feedback fechado, que aciona luz apenas quando o acelerômetro detecta imobilidade, 94 % completaram o trajeto; a iluminação foi necessária em média 20 % do tempo. A velocidade média registrada foi de 4 cm/s, percorrendo cerca de 170 cm por ensaio.
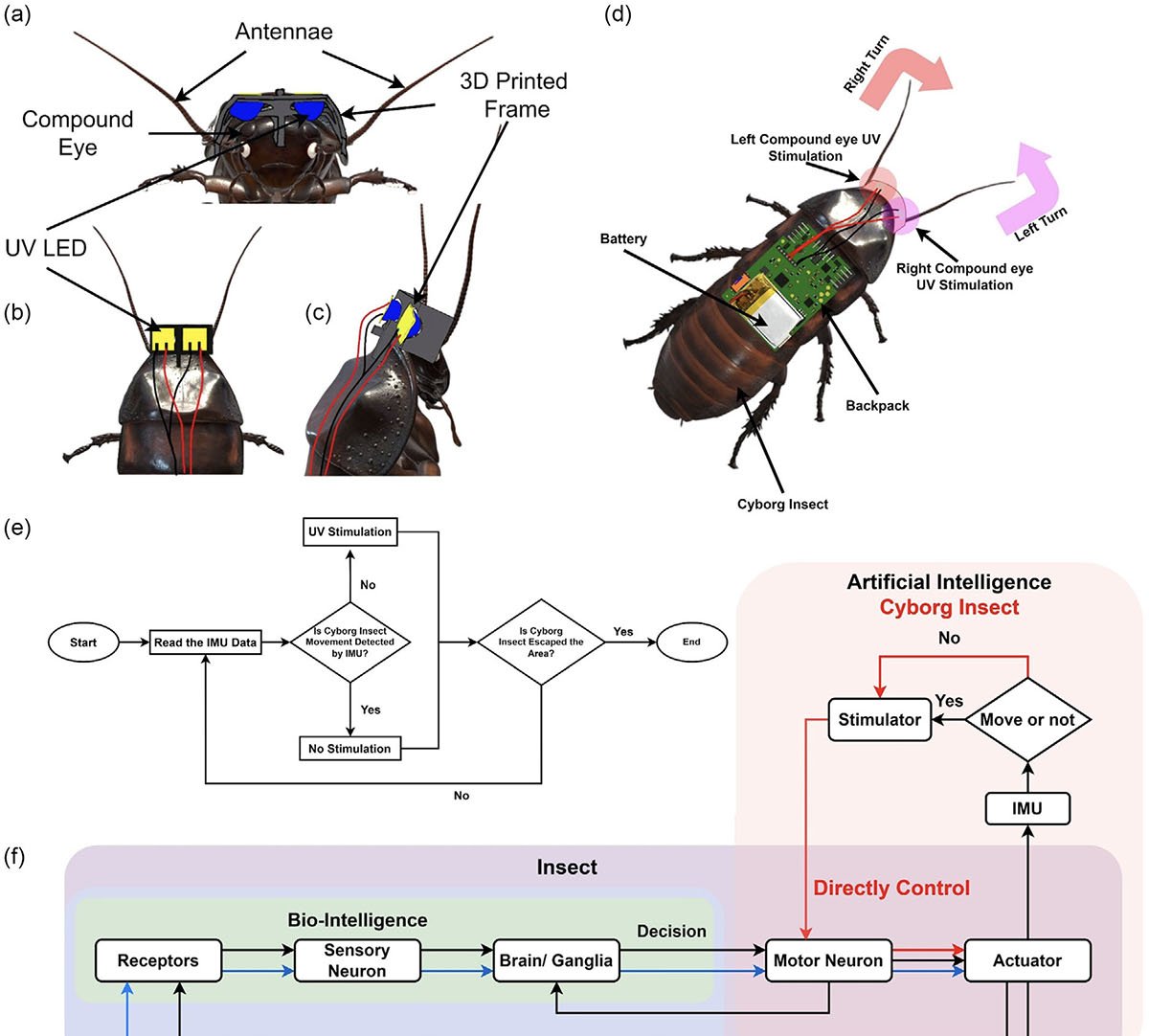
Imagem: Nanowerk https
Limitações e próximas etapas
Apesar dos resultados, os autores apontam variações individuais de sensibilidade ao UV, autonomia limitada pela bateria e possíveis interferências ambientais como desafios a superar. Mesmo assim, o sistema reforça o potencial de plataformas biohíbridas para missões em espaços confinados ou perigosos, onde robôs convencionais encontram dificuldades.
Com informações de Nanowerk